Betriebssysteme
- Computerarchitektur
- Betriebssysteme
- Prozessverwaltung
- Speicherverwaltung
- Geräteverwaltung
- Dateiverwaltung
Computerarchitektur
Die Computerarchitektur ist ein Teilgebiet der Informatik, welche sich mit dem internen sowie externen Aufbau eines Computersystems beschäftigt.
Von-Neumann-Architektur
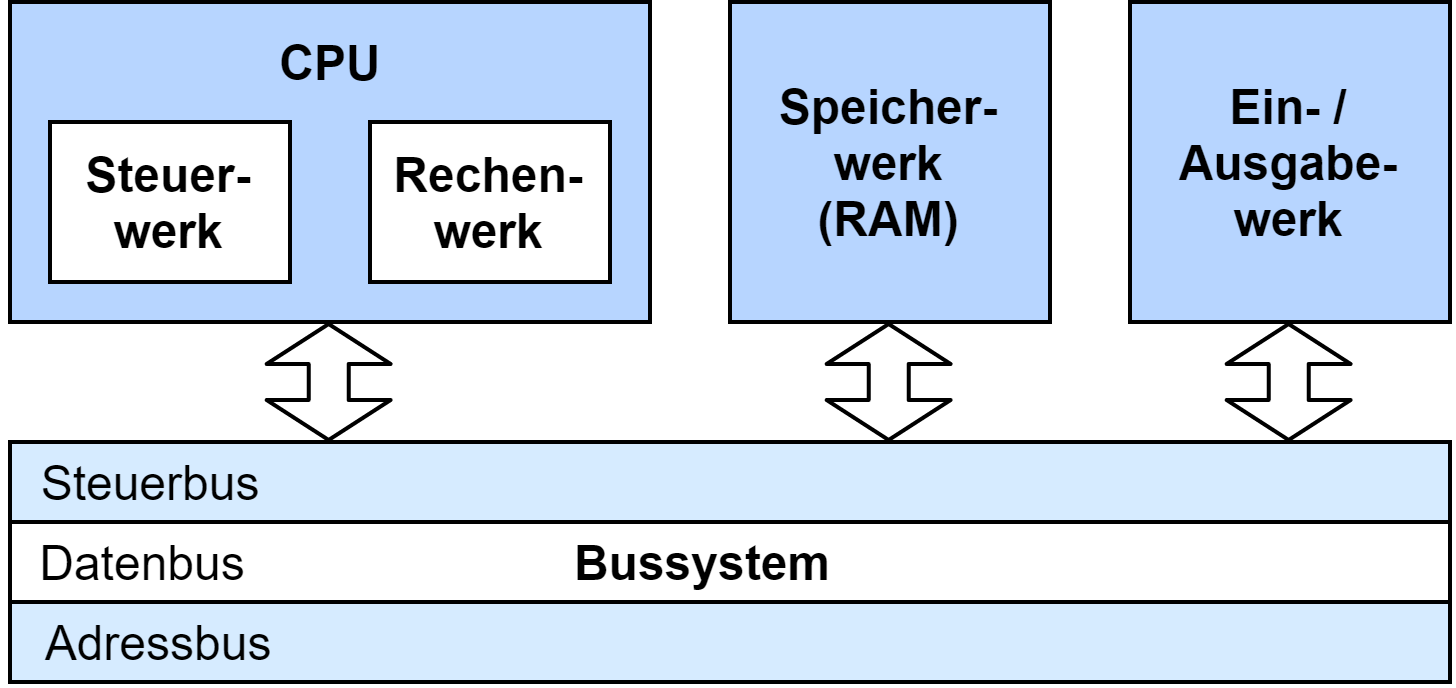
Die Von-Neumann-Architektur bildet ein Referenzsystem für Computer und besteht aus einer CPU mit Steuerwerk und Rechenwerk, einem Ein- / Ausgabewerk, einem Speicherwerk und einem Bus-System. Das Bus-System verbindet die Komponenten miteinander.
Von-Neumann-Flaschenhals
Nur eine angeschlossene Komponente kann zur selben Zeit schreibend auf das Bussystem zugreifen, da es sonst zu einer Kollision kommen würde. Das macht das Gerät insgesamt langsam.
CPU
Die CPU ist ein zentraler Bestandteil eines Rechners. Sie besteht aus dem Steuerwerk, dem Rechenwerk und verschiedenen Registern.
Steuerwerk
Das Steuerwerk dient der sequentiellen Abarbeitung von Programmen.
Fetch
- Adresse aus Befehlszähler auslesen → RAM
- Befehl aus Steuerwerk → RAM
- RAM liefert Daten zurück
- Daten → Befehlsregister
Decode
→ Befehl decodieren, Weichen stellen
Execute
→ Befehl ausführen
Rechenwerk
Das Rechenwerk führt vom Steuerwerk in Auftrag gegebene Berechnungen durch.
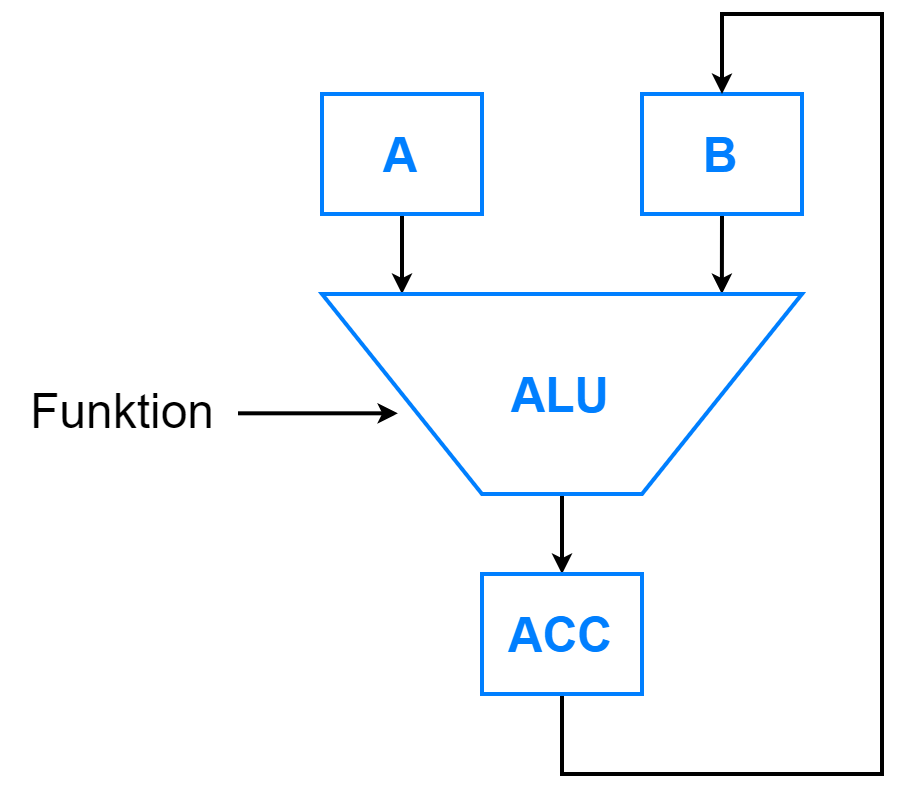 In der ALU werden Funktionen durchgeführt. Die Werte werden schließlich im Akkumulator zwischengespeichert, wo sie ausgelesen werden können.
In der ALU werden Funktionen durchgeführt. Die Werte werden schließlich im Akkumulator zwischengespeichert, wo sie ausgelesen werden können.
Speicherwerk
Das Speicherwerk ist in eine endliche Anzahl gleichgroßer Speicherzellen unterteilt. Jede Zelle verfügt über eine eindeutige Adresse. Es kann den Wert einer adressierten Speicherstelle auslesen oder einen Wert in eine Speicherzelle schreiben.
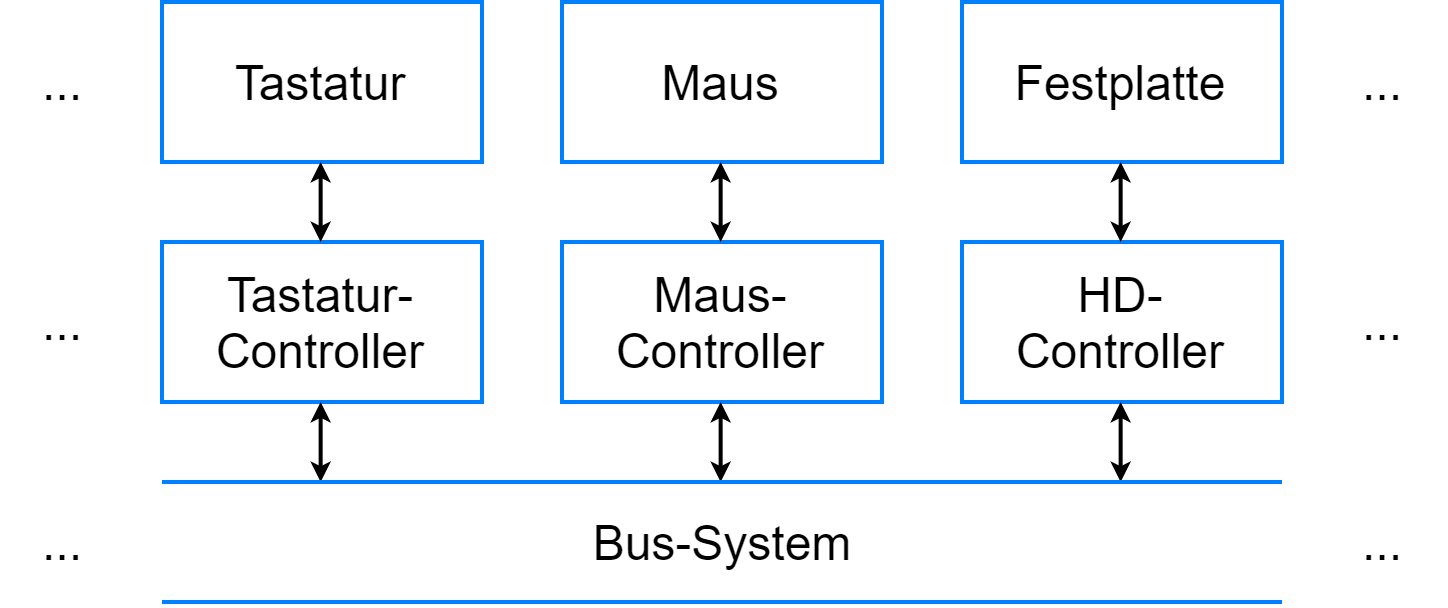
Ein- / Ausgabewerk
Das Ein- / Ausgabewerk dient der Ein- und Ausgabe von Informationen über verschiedene Peripheriegeräte (Maus, Tastatur, Monitor, ...). Für jedes Gerät gibt es einen Controller.
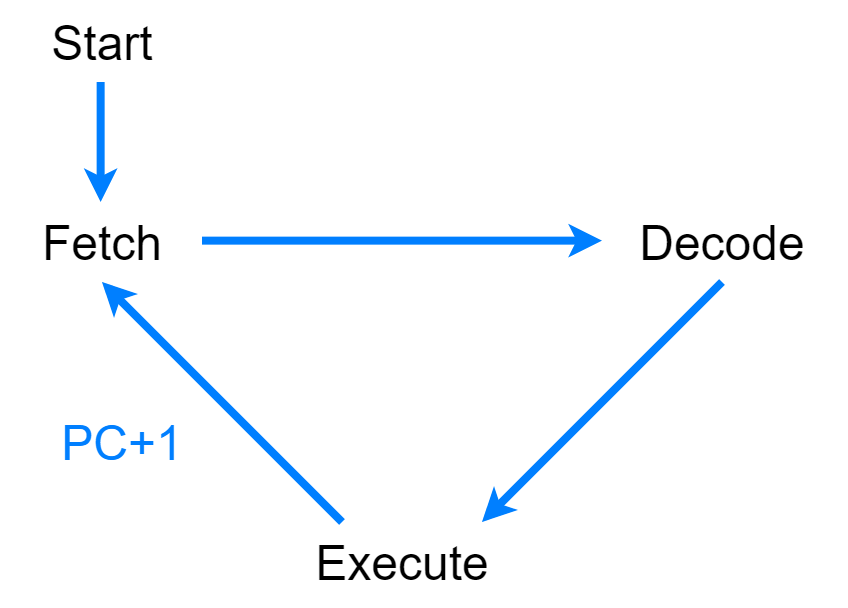
Von-Neumann-Zyklus
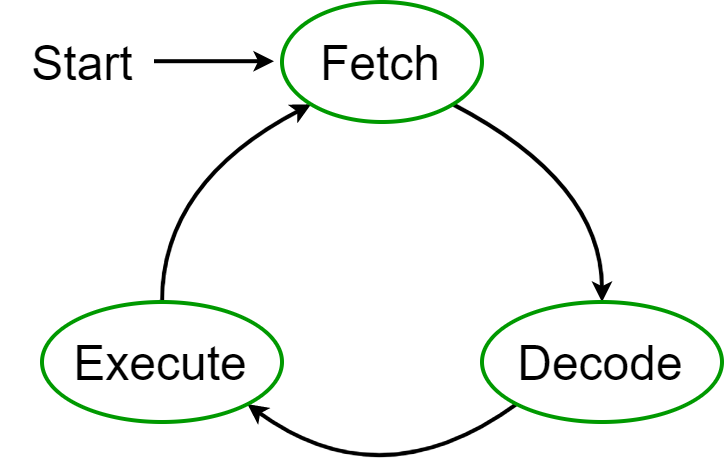
Fetch:
- Sende Adresse des Befehls an das Speicherwerk
- Empfange aktuellen Befehl vom Speicherwerk
→ Hole aktuellen Befehl
Decode:
- Analysiere Befehl und treffe Vorbereitungen
- Erhöhe Programcounter (um 1)
Execute:
- Führe den Befehl aus
Weitere Komponenten der Von-Neumann-Architektur
Register
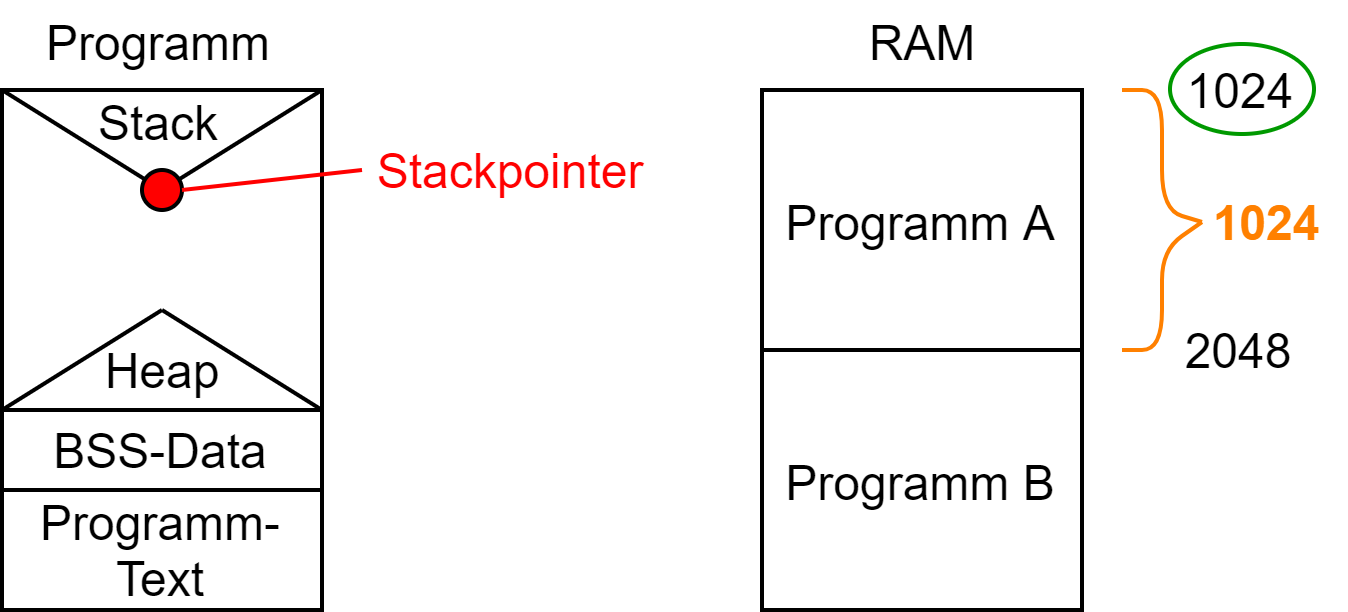 Im Stackregister wird der Stackpointer, der oberste Punkt des Stacks, gespeichert.
Im Stackregister wird der Stackpointer, der oberste Punkt des Stacks, gespeichert.
Das Basisregister legt die Adresse fest, zu der das Programm beginnt.
Im Limitregister wird die Größe des Speicherbereiches gespeichert.
Um mehrere Programme im RAM zu halten, werden das Basis- und Limitregister benötigt.
Interrupt-Controller
Der Interrupt-Controller nimmt Interruptsignale entgegen und informiert die CPU über das Vorliegen eines Interrupts.
Die CPU arbeitet den Interrupt mit der Interruptbehanldungsroutine ab.
Die Interruptbehandlungsroutine ist eine Reihe von Anweisungen, die einem bestimmten Interrupt zugeordnet sind und auf der CPU abgearbeitet werden können.
Was passiert bei einem Interrupt?
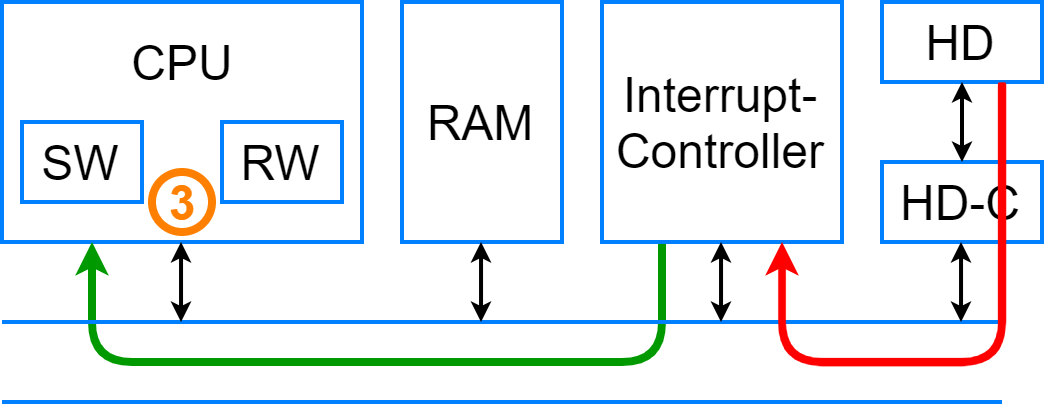 1. HD löst Interrupt aus. Interrupt wird an Interrupt-Controller gesendet und in Queue gespeichert.
1. HD löst Interrupt aus. Interrupt wird an Interrupt-Controller gesendet und in Queue gespeichert.
2. Der Interrupt-Controller meldet den Interrupt dem Steuerwerk.
3. Nach der letzten Execute-Phase des aktuellen Prozesses werden aktuelle Registerinhalte gesichert. Die Interruptbehandlungsroutine wird ausgeführt.
Kontextwechsel
Damit mehrere Prozesse quasi gleichzeitig auf der CPU laufen können, müssen regelmäßig Kontextwechsel durchgeführt werden.

Während eines Kontextwechsels werden Registerinhalte des vorherigen Prozesses gesichert und Registerinhalte des neuen Prozesses geladen.
Zwischengespeichert werden die Registerinhalte auf dem Stack des jeweiligen gerade ausgeführten Programmes.
Der Stackpointer wird in einer bestimmten Verwaltungseinheit vom Betriebssystem hinterlegt.
Kontextwechsel VS Interrupt
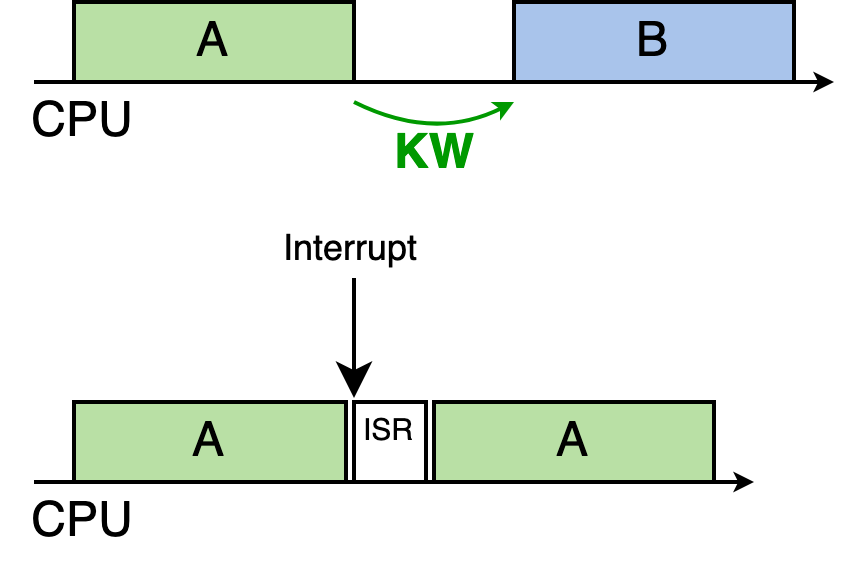 Bei einem Kontextwechsel werden alle Registerinhalte eines Prozesses zwischengespeichert. Bei hunderten Registern ist das entsprechend zeitaufwendig.
Bei einem Kontextwechsel werden alle Registerinhalte eines Prozesses zwischengespeichert. Bei hunderten Registern ist das entsprechend zeitaufwendig.
Ein Interrupt setzt einen Prozess nur kurzzeitig aus und lässt die wesentlichen Registerinhalte im Prozessor unangetastet. Es werden nur eine Hand voll Registerinhalte kurzzeitig ausgetauscht und zwischengespeichert. Die Interruptserviceroutine läuft durch und anschließend wird der vorher laufende Prozess wird fortgesetzt.
DMA-Controller
Der Direct-Memory-Access-Controller dient dazu, die CPU bei dem Datentransfer (z.B. HD zu RAM) zu entlasten.
Prozess ohne DMA
LHD → 1. Teil laden (XXX → Kontextwechsel)
STORE → Datenwort in RAM ablegen
LHD
...
Die CPU ist ca. 1 Mio mal schneller als die HD, daher wird ein Kontextwechsel zu einem anderen Prozess gemacht. Sobald ein Programmteil geladen wurde, wird ein Interrupt gesendet. Das führt zu vielen Interrupts in Prozess B.
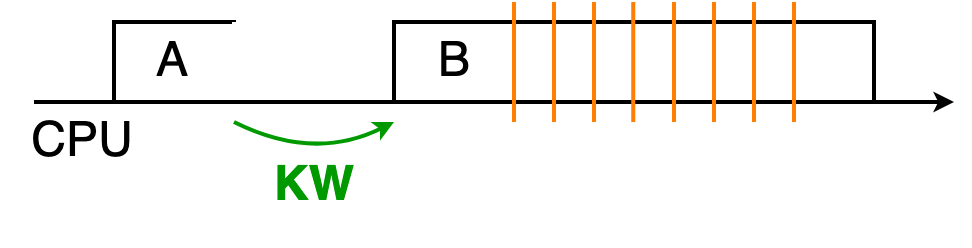 Der DMA-Controller löst das Problem. Er agiert als Mini-CPU und kontrolliert den Datentransfer. Sobald das Programm vollständig in den RAM geladen wurde, sendet er einen Interrupt.
Der DMA-Controller löst das Problem. Er agiert als Mini-CPU und kontrolliert den Datentransfer. Sobald das Programm vollständig in den RAM geladen wurde, sendet er einen Interrupt.
Solange kann die CPU an einem anderen Prozess weiterarbeiten.
Er benötigt dabei Quellsystem, Zielsystem, die jeweilige Startadresse und die zu übertragende Menge (Datenwörter).
Betriebssysteme
Ein Betriebssystem ist ein Programm, das dem Benutzer und Anwendungsprogrammen elementare Dienste bereitstellt. Es steuert und überwacht die Abwicklung von Programmen und regelt den Betrieb des Rechnersystems. Die zentrale Aufgabe eines Betriebssystems ist die Betriebsmittelverwaltung. Unter einem Betriebsmittel versteht man eine beliebige Hardware- oder Software-Ressource. Betriebsmittel sind Prozessen zugeordnet.
Kernel-Mode → Alle Befehle sind zugelassen
User-Mode → Nur bestimmte Befehle sind zugelassen, Zugriff auf bestimmte Dinge über Systemaufrufe (BS führt Befehle stellvertretend für Anwendungsprogramm aus)
Prozessverwaltung
Ein Prozess ist ein Programm in Ausführung.
Prozesse erzeugen
Bei der Erzeugung eines Prozesses bekommt dieser eine eindeutige ID.
Windoof
- Die createProcess-Methode wird aufgerufen
- In 6 Phasen wird der Prozess initialisiert
Linux
- Die fork-Methode erzeugt eine exakte Kopie des aktuellen Prozesses
- Der Kindprozess wird mit eigenen Inhalten gefüllt, bekommt eine eigene P-ID → aushöhlen und neu befüllen
Prozesskontrollblock
In einem Prozesskontrollblock fasst das Betriebssystem alle zu einem einzelnen Prozess gehörenden Informationen zusammen.
ID, Besitzer, Programm-Ausführdatei, Zustand, Liste der geöffneten Dateien
Prozesstabelle
In einer Prozesstabelle fasst das Betriebssystem alle Informationen aller erzeugten Prozesse zusammen. Es stehen alle Prozesskontrollblöcke untereinander. (z.B. Task-Manager)
Prozesszustände
Wir unterscheiden drei Prozesszustände.
 Der Scheduler entscheidet, welcher Prozess die CPU als nächstes bekommt.
Der Scheduler entscheidet, welcher Prozess die CPU als nächstes bekommt.
Thread
Unter einem Thread versteht man einen Teil eines Prozesses, der einen unabhängigen Kontrollfluss repräsentiert.
Threads wechseln sich durch Threadkontextwechsel immer wieder auf der CPU ab.
Dabei gibt es auch einen Threadscheduler.
Jeder Prozess hat mindestens einen Thread.
Scheduling
Unter Scheduling versteht man die Tätigkeit des Aufteilens der verfügbaren Prozessorzeit (CPU-Zeit) auf alle Prozesse.
 Der Schedular führt die Scheduling-Tätigkeit durch.
Der Schedular führt die Scheduling-Tätigkeit durch.
Der Dispatcher entzieht bei einem Kontextwechsel dem derzeit aktiven Prozess die CPU und teilt sie dem nächsten Prozess zu.
Die Zeit, die ein Prozess zusammenhängend auf der CPU hat, wird als Quantum bezeichnet. Als Programmierer hat man keine Ahnung, wie lang ein solches Quantum auf einer jeweiligen CPU dauert und wie viele Befehle man innerhalb von einem Quantum abarbeiten kann.
Scheduling-Verfahren
First Come-First Serve

→ Die Prozesse laufen nacheinander vollständig auf der CPU ab.
Shortest Job First
→ Der kürzeste Prozess wird als erstes abgearbeitet. Die Zeit des Prozesses muss dafür vom Programmierer angegeben werden.
Shortest Remaining Time Next

→ Es bekommt der Prozess die CPU, der die kürzeste Restlaufzeit besitzt (Kontextwechsel, falls Prozess warten muss).
Round-Robin

→ Nach Ablauf eines Quantums wird ein Kontextwechsel zu einem Prozess mit der nächst-höheren P-ID und dem Zustand "Ready" gemacht.
→ Basiert auf einer ringförmig verketteten Liste (Next des letzten Elements zeigt wieder auf das erste).
Priority Scheduling
→ gleiches Verhalten wie beim Round Robin, nur werden zusätzlich Prioritäten eingeführt.
→ Es werden zuerst Prozesse mit hoher Priorität abgearbeitet.
→ Prioritäten werden nach bestimmter Zeit runtergestuft.
Synchronisation
Bei der Synchronisation geht es um Mechanismen zur Vermeidung von Problemen, die bei der nebenläufigen Ausführung von Prozessen oder Threads in Verbindung mit gemeinsam genutzten Betriebsmitteln entstehen können.
Ein Betriebsmittel ist eine beliebige Hard- oder Software-Ressource, z.B. eine Variable, ein Drucker oder eine Datei.
Unter Nebenläufigkeit versteht man die quasi-parallele Ausführung von Befehlen unterschiedlicher Prozesse oder Threads auf der CPU.
Unter Race Conditions versteht man Situationen, bei denen zwei oder mehr Prozesse ein oder mehrere Betriebsmittel gemeinsam nutzen, und das Ergebnis der Ausführung von der zeitlichen Reihenfolge der Zugriffe der beteiligten Prozesse oder Threads auf das Betriebsmittel abhängt.
→ z.B. nutzen einer gleichen Variable (Kap. 3.2.11.1.2)
Unter einem kritischen Abschnitt versteht man Programmteile, die während ihrer Ausführung auf der CPU nicht durch kritische Abschnitte anderer Prozesse oder Threads unterbrochen werden dürfen, sofern die beteiligten Prozesse oder Threads auf gemeinsam genutzte Betriebsmittel zugreifen.
Aktives Warten
Aktives Warten ist das ständige Abfragen eines Sperrkennzeichens am Eingang eines kritischen Abschnitts.
while (lock == 1); // Tue nichts
lock = 1;
// kritischer Abschnitt!
lock = 0;Problem:
Ein Kontextwechsel im ungünstigsten Moment (nach while (lock == 1); und vor Setzen der lock-Variable lock = 1;) führt dazu, dass es trotzdem zu Fehlern kommen kann. Der kritische Abschnitt ist entsperrt, die Variable aber noch nicht.
TSL
Mit dem TSL-Befehl passieren zwei Dinge als atomare Aktion:
Atomare Aktion: Nicht teilbar! KW kann entweder vor oder nach TSL Befehl passieren. Nicht zwischen dem Holen des Werts einer Speicherzelle und dem Überschreiben der Zelle mit dem Wert 1.
→ Wert aus Speicherzelle X in Akkumulator kopieren
→ Wert an Speicherzelle X mit 1 überschreiben (lock = 1)
Das Problem des ungünstigsten Moments ist gelöst.
Beim aktiven Warten wird CPU-Zeit vergeudet: Der Prozess ist 100% damit beschäftigt, die Bedingung zu prüfen und nichts zu tun.
Semaphore
Unter einem Semaphor versteht man eine Datenstruktur, welche einen ganzzahligen Zähler sowie eine Warteschlange bereitstellt. Zusätzlich sind zwei atomare Operationen P() und V() auf diese Datenstruktur definiert.
Semaphor (0, 1)
Mutex, binär
ein Betriebsmittel
Semaphor (x > 1)
Zählsemaphor
x Betriebsmittel
P()
- Hat der Zähler einen positiven Wert, verringere ihn um 1
- Ansonsten blockiere den aufrufenden Prozess und füge ihn der Warteschlange hinzu
V()
- Ist die Warteschlange nicht leer, entblockiere den ersten Prozess
- Ansonsten erhöhe den Zähler um 1
Wechselseitiger Ausschluss
Semaphor x = new Semaphore(1);
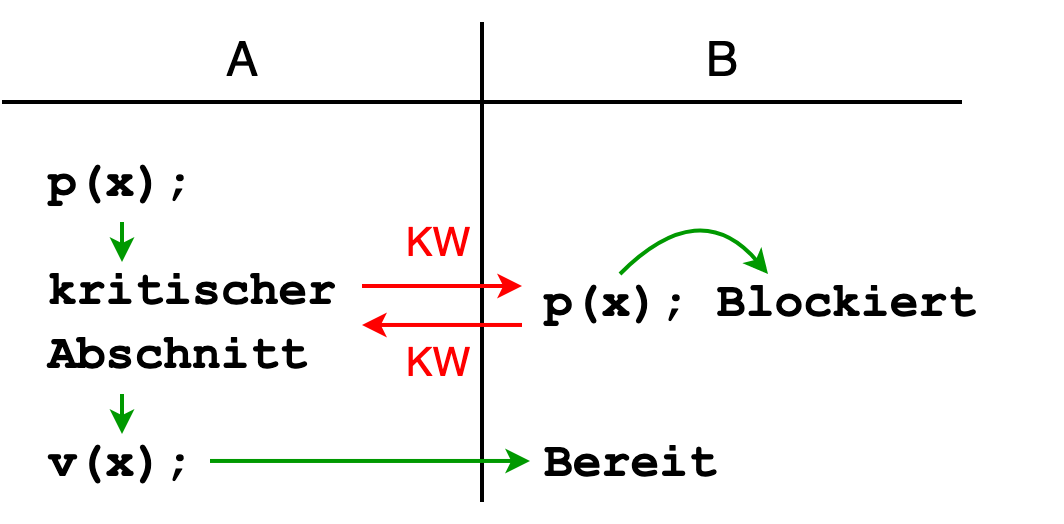
Da A sich im kritischen Abschnitt befindet, wird B durch x blockiert (Zähler von x ist auf 0). Nachdem A den kritischen Abschnitt verlässt, wird B durch v(x) entblockiert.
Reihenfolge durch Setzung
Semaphor frei = new Semaphor(1);Semaphor belegt = new Semaphor(0);
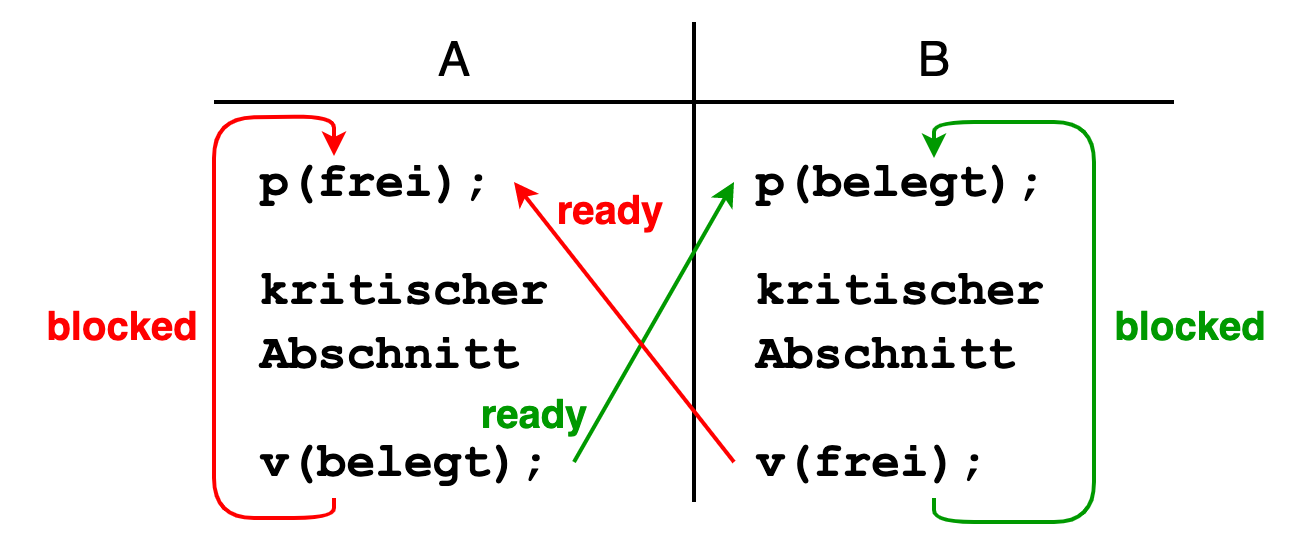
Bei zwei voneinander abhängigen Prozessen werden zwei Semaphore benötigt, sodass sich die Prozesse gegenseitig entblockieren.
Deadlocks
Eine Menge von Prozessen befindet sich in einem Deadlock-Zustand, wenn jeder Prozess aus der Menge auf ein Ereignis wartet, das nur ein anderer Prozess der Menge auflösen kann.
Beispiel: Prozess A und B benötigen BM1 und BM2. A hat bereits BM1 an sich gebunden, B hat BM2. Beide Prozesse warten nun auf das jeweils andere Betriebsmittel.
Betriebsmittelgraph
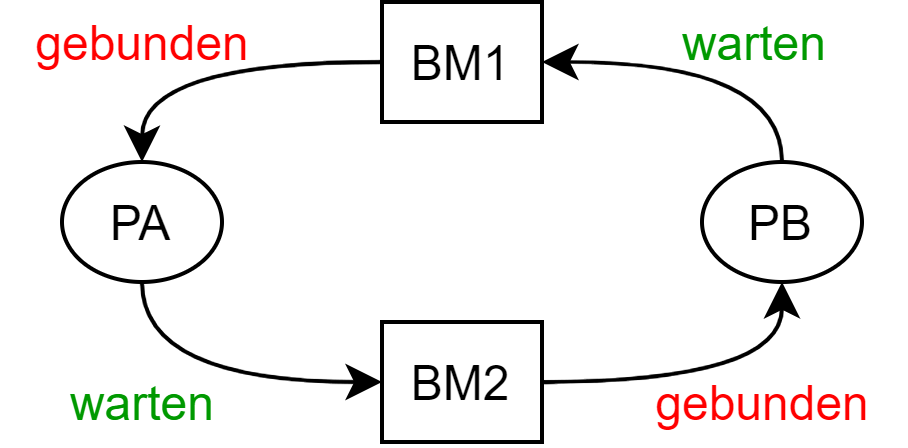
Vier Bedingungen nach Coffman
- Mutual exclusion condition
→ Gegenseitiger Ausschluss
→ es steht nur ein BM zur Verfügung - Wait for condition
→ warten auf ein anderes BM - No preemption condition
→ Den Prozessen können bereits gebundene BM nicht entrissen werden - Circular wait condition
→ siehe Betriebsmittelgraph
Theoretisch könnten Deadlocks vermieden werden, indem jedes BM eine Nummer bekommt und immer das BM mit der niedrigeren Nummer zuerst angefordert wird. (Bsp. Bank: 3.2.12.4 Aufg. 3)
In der Praxis funktioniert das nicht: Zu Beginn ist nicht klar, welche BM vom Prozess benötigt werden.
Deadlocks kommen sehr selten vor und es ist aufwendig, sie zu erkennen (kostet viel Rechenzeit).
Daher werden sie in gängigen Betriebssystemen ignoriert.
Interprozesskommunikation
In Betriebssystemen müssen Möglichkeiten geschaffen werden, damit Prozesse und Threads miteinander kommunizieren können:
- gemeinsame Daten- und Speicherbereiche
- Sockets → Netzwerkverbindung; Pipes → Ausgabe von P1 = Eingabe von P2
Speicherverwaltung
Die Speicherverwaltung ist Teil des Betriebssystems und erledigt alle erforderlichen Arbeiten zur Verwaltung des physischen und des virtuellen Speichers eines Computers.
Grundlagen
Virtuelle Speicherverwaltung
Prozesse werden in einem virtuellen Speicher gehalten, um im RAM nur tatsächlich benötigte Programmteile zu speichern. Die MMU (Memory Management Unit) rechnet die virtuellen Speicheradressen in die physischen Adressen um.
Ein Seitenrahmen ist ein zusammenhängender Block von Speicherzellen des virtuellen Speichers (RAM).
Eine Seite ist ein zusammenhängender Block von Speicherzellen des physischen Speichers (RAM). Die Größe einer Seite entspricht der Größe eines Seitenrahmens.
Seitentabellen
Zur Umrechnung der virtuellen Speicheradresse in die physische werden Seitentabellen benötigt.
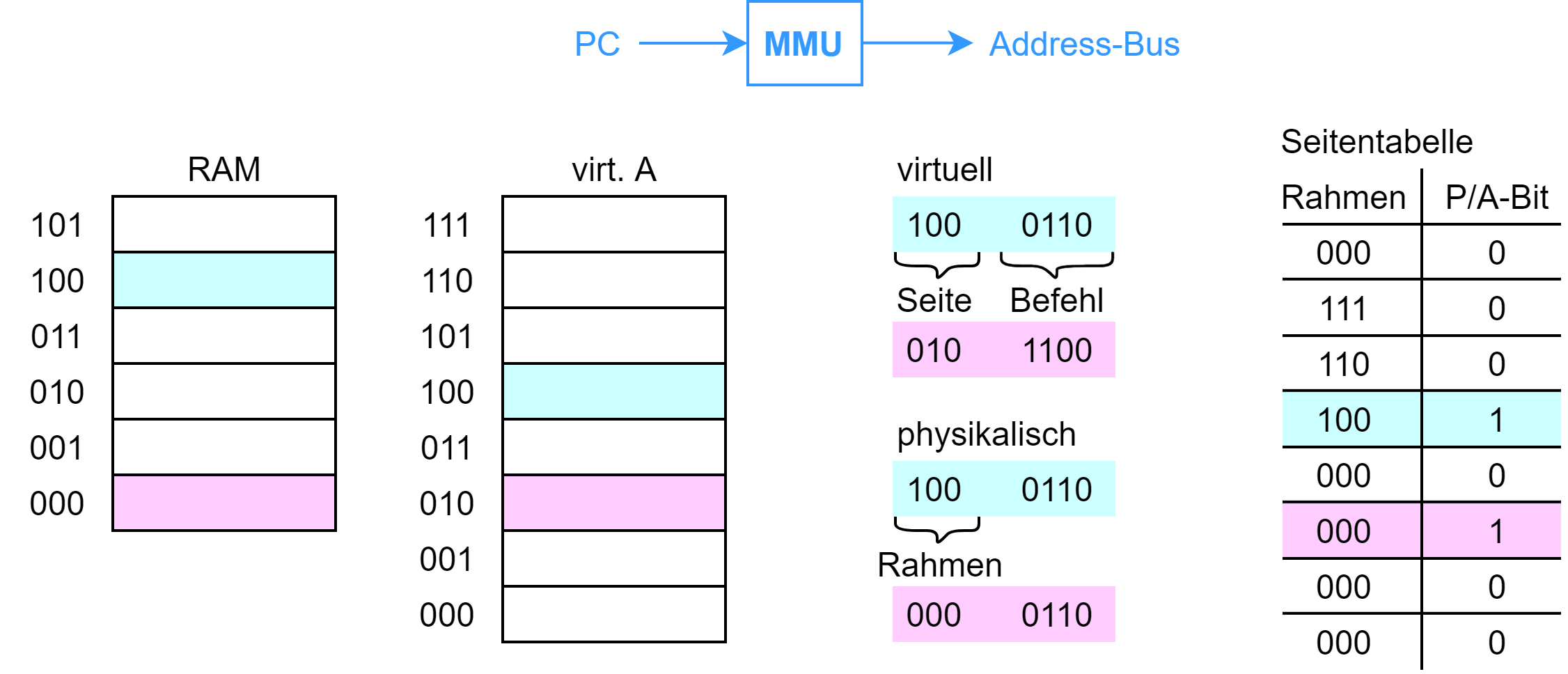
Die MMU prüft in der Seitentabelle des aktuellen Prozesses den Eintrag an der entsprechenden Stelle aus der virtuellen Adresse.
Ist das P/A-Bit = true (1), kann die Rahmennummer aus der Tabellenzeile entnommen werden.
Ist das P/A-Bit = false (0), kommt es zu einem Page-Fault (Seitenfehler). Die Seite muss zunächst vom DMA-Controller in den RAM-Speicher geladen werden. Ist der RAM bereits voll, kommen Seitenersetzungsverfahren ins Spiel.
Swapping
Kompletter Prozess wird ausgetauscht (Basis- & Limitregister, ...)
Wenn der RAM voll ist wird ein gesamter Prozess in den HD Speicher verschoben, sodass Platz im RAM für einen neuen Prozess geschaffen wird.
Ein kompletter Prozess ist entweder ganz eingelagert (RAM) oder ganz ausgelagert (HD)
(Altes Verfahren)
Seitenersetzungsverfahren → Paging
Unter Paging versteht man das Ein- bzw. Auslagern von Teilen eines Prozesses.
Optimale Seitenersetzung
→ Welche Seite wird in der Zukunft am längsten nicht benötigt?
Die optimale Seitenersetzung kann nicht programmiert werden.
No Recently Used
→ Welche Seite wurde in der Vergangenheit am längsten nicht genutzt?
Es wird davon ausgegangen, dass diese Seite auch in Zukunft lange nicht benötigt wird.
Es wird ein Referenziert-Bit und ein Modifiziert-Bit eingeführt.
Das R-Bit wird true (1) gesetzt, wenn die Seite verwendet wurde. Es wird in regelmäßigen Abschnitten auf false (0) gesetzt.
Das M-Bit wird true (1) gesetzt, wenn die Seite verändert wurde.
In folgender Reihenfolge werden Seiten gesucht und ersetzt. Wenn:
1. R = 0 && M = 0 (Seite nicht verwendet)
2. R = 0 && M = 1 (Seite modifiziert, lange nicht verwendet)
3. R = 1 && M = 0 (Seite verwendet, nicht modifiziert)
4. R = 1 && M = 1 (Seite verwendet und modifiziert)
First-In-First-Out
→ Die Seiten, die zuerst im RAM gespeichert wurden, werden als erstes überschrieben.
Working Set
→ Die wichtigsten Seiten, das "Working-Set" eines Prozesses werden eingelagert.
Second Chance
→ In einem kreisförmigen Durchlauf wird die Schlange der zuerst eingelagerten Seiten durchlaufen. Ist das R-Bit = true (1) wird es auf false (0) gesetzt und die Seite bekommt eine zweite Chance.
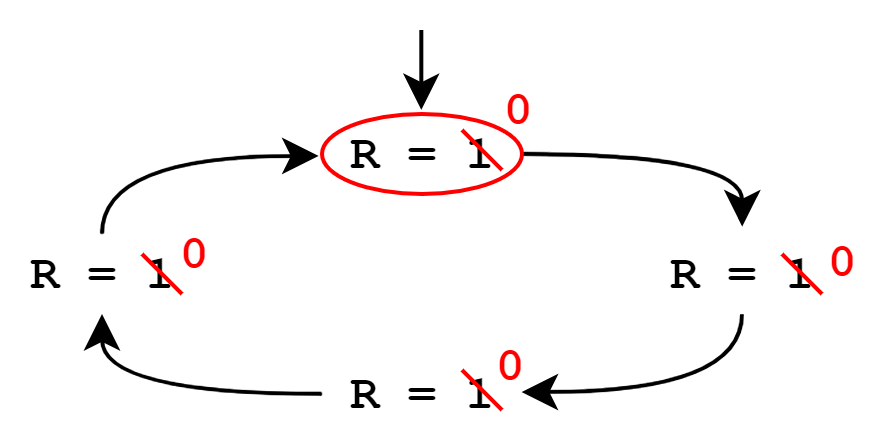 Sind alle
Sind alle R-Bit = 1 wird der erste Prozess ersetzt (die Seite).
Shared Memory
Zur Interkommunikation können gemeinsame Speicherbereiche sinnvoll sein. Dazu wird der Seitenrahmen des RAMs in allen Seitentabellen aller beteiligten Prozesse hinterlegt.
Geräteverwaltung
Unter der Geräteverwaltung fasst man alle Aufgaben und Tätigkeiten des Betriebssystems zusammen, welche einer optimierten Zusammenarbeit zwischen dem Betriebssystem und den Peripheriegeräten (Maus, Tastatur, ...) dienen.
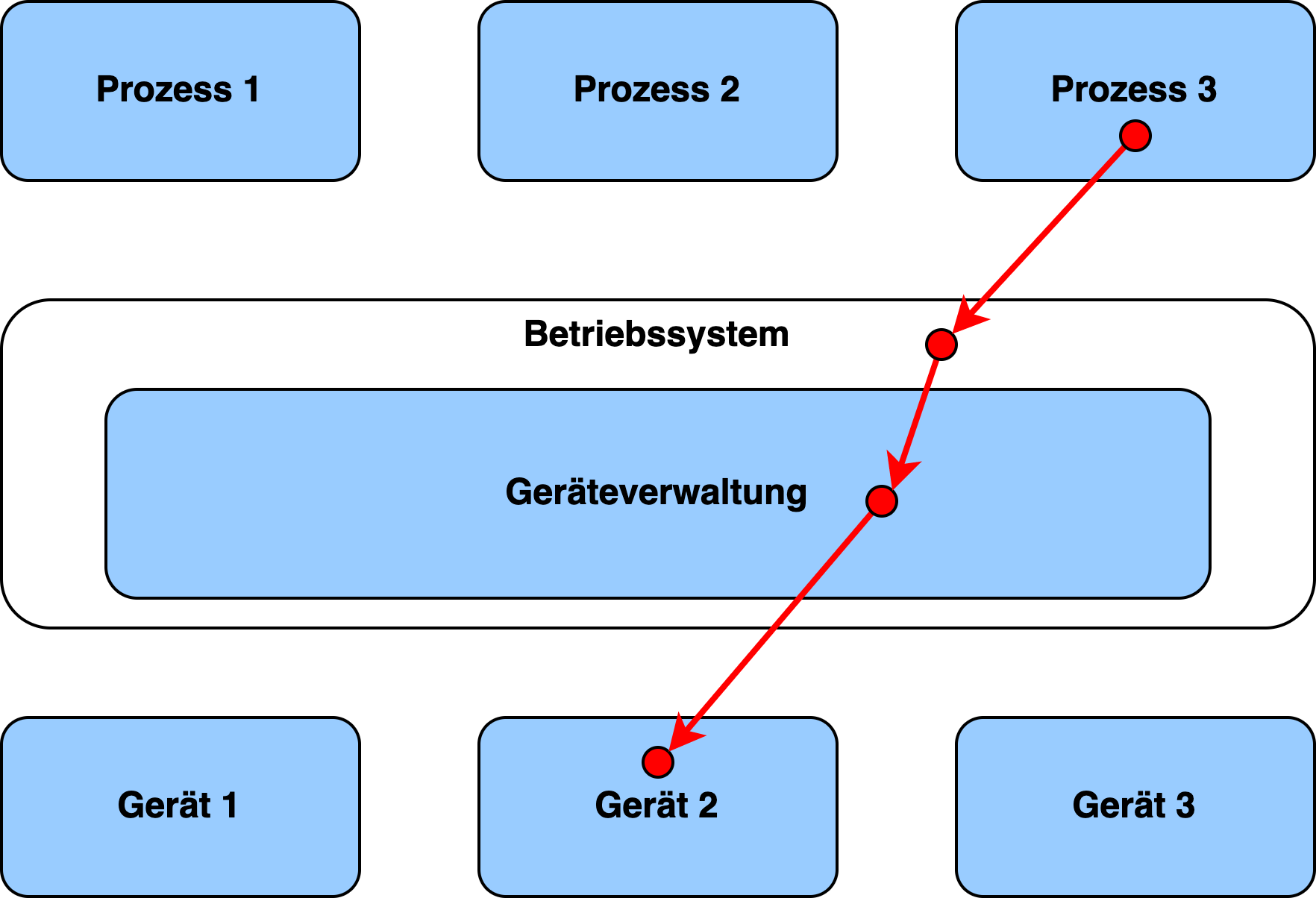 Geräte können nur über Systemaufrufe miteinander kommunizieren.
Geräte können nur über Systemaufrufe miteinander kommunizieren.
Gerätetreiber
Unter einem Gerätetreiber versteht man eine Software-Komponente, welche zur Geräteverwaltung des Betriebssystems gehört und Interaktionen zwischen Betriebssystem und Controller eines bestimmten Peripheriegeräts steuert.
 Aufgaben des Gerätetreibers
Aufgaben des Gerätetreibers
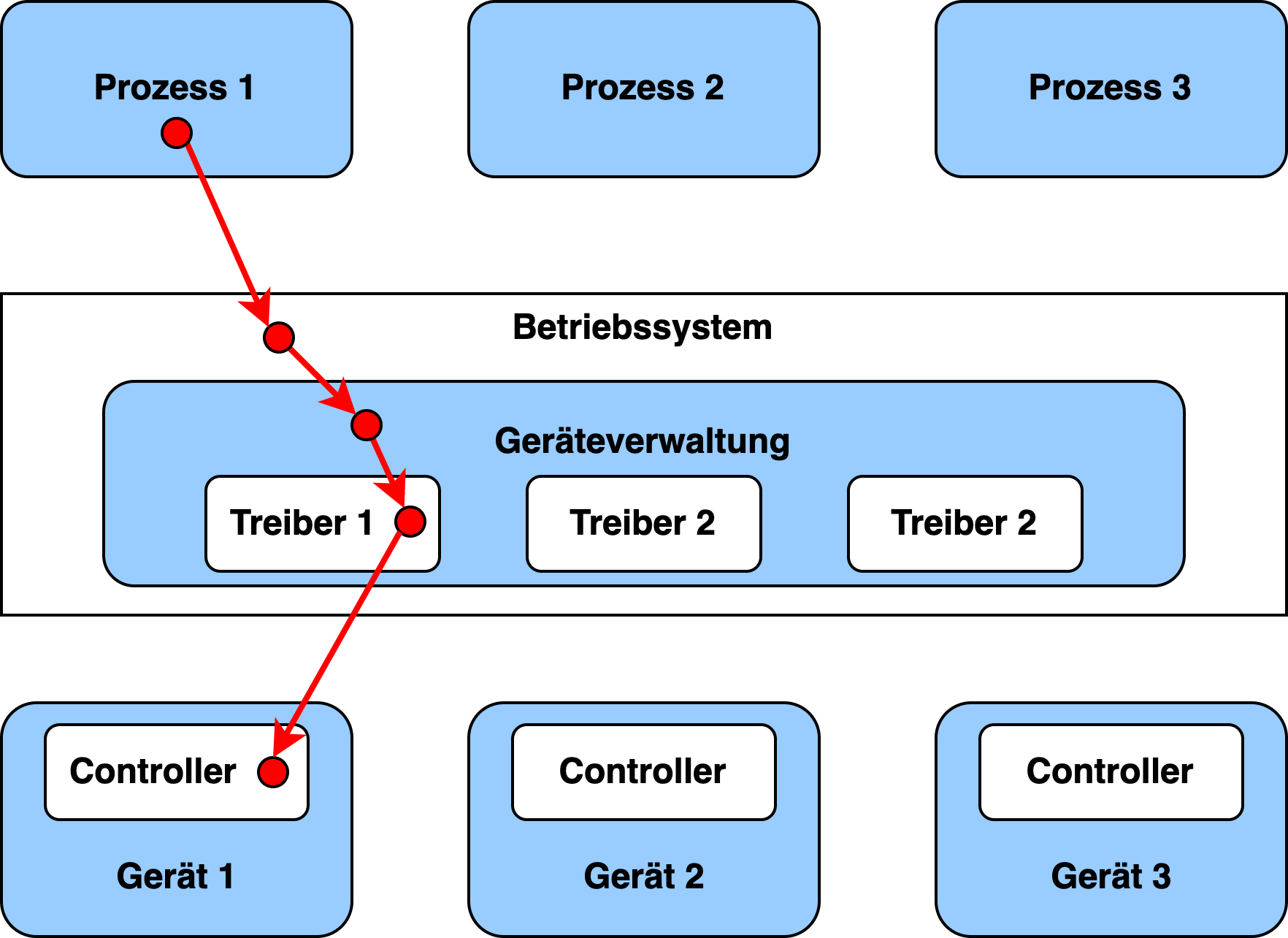
- Initialisierung des Gerätecontrollers
- Gerät dem Betriebssystem bekannt machen
- Interruptbehandlung für ein Gerät
- Bereitstellen einer Schnittstelle zum Gerätecontroller und zur Geräteverwaltung
Geräteklassen
Bei der Implementierung der Geräteverwaltung unterscheidet das Betriebssystem unterschiedliche Geräteklassen.
Blockorientierte Geräte...
...übertragen Daten jeweils in ganzen Blöcken, was sowohl beim Lese- auch auch beim Schreibvorgang gilt. Jeder Datenblock ist direkt adressierbar.
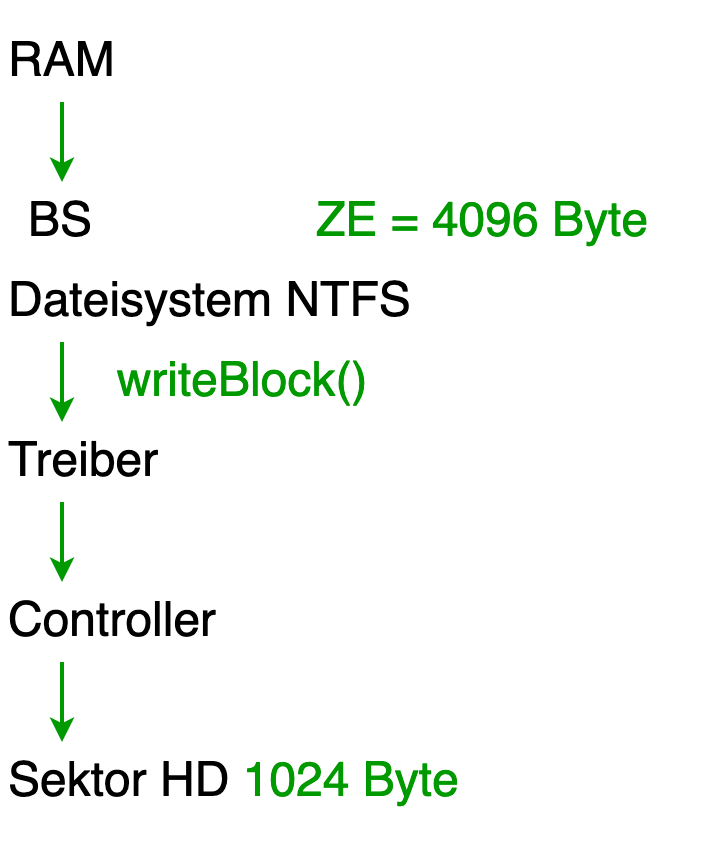
Für die Zusammenarbeit mit der Geräteverwaltung implementiert der Gerätetreiber eines blockorientierten Gerätes folgende Funktionen:
initDevice()→ Gerät initialisierenreadBlock()→ Block lesenwriteBlock()→ Block schreibenhandleInterrupt()→ Interruptbehandlung
Bsp. Festplatte: → Sektorgröße lesen und schreiben
Zeichenorientierte Geräte...
...erzeugen oder empfangen einen Datenstrom. Die einzelnen Zeichen sind dabei nicht adressierbar.
Für die Zusammenarbeit mit der Geräteverwaltung implementiert der Gerätetreiber eines zeichenorientierten Gerätes folgende Funktionen:
initDevice()→ Gerät initialisierenreadChar()→ Zeichen lesenwriteChar()→ Zeichen schreibenhandleInterrupt()→ Interrupt behandeln
Bsp. Maus & Tastatur
Dateiverwaltung
Unter einer Datei versteht man einen Bestand an zusammengehörigen digitalen Daten, die dauerhaft auf einem geeigneten Speichermedium gespeichert sind.
Dateisystem
Unter einem Dateisystem versteht man den Teil eines Betriebssystems, der die geordnete Ablage und das leichte Wiederfinden von Dateien auf geeigneten Speichermedien ermöglicht, sowie die erforderlichen Zugriffsmöglichkeiten auf die Dateien bereitstellt.
Aufgaben eines Dateisystems
- Verwaltung des freien und belegten Speicherplatzes
- Verwalten von Verzeichnissen
- Verwaltung von Zugriffsrechten und Attributen
- Strukturiertes Ablegen von Dateien
Dateisysteme unter Windows
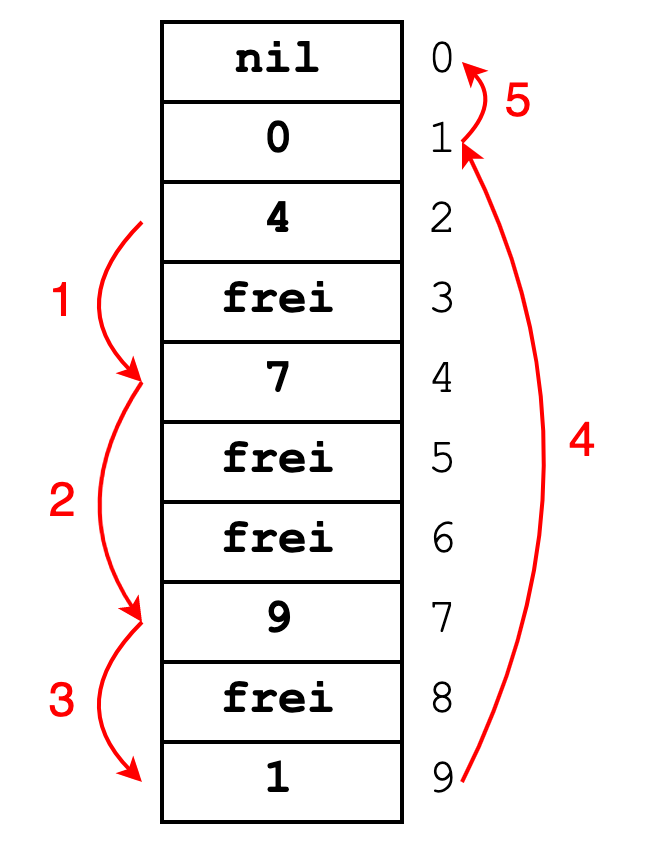
FAT - File Allocation Table
FAT ist eine Dateizuordnungstabelle die den Dateien Zuordnungseinheiten zuordnet und freie und belegte ZE zeigen kann.
1. Datei beginnt in ZE 2. Dies steht im Verzeichniseintrag des BS.
2. Datei geht weiter in ZE 4. Danach ZE 7 usw.
3. Datei endet in ZE 0.
NTFS - New Technology File System
 Im Master File Table speichert das NTFS-Dateisystem Informationen zu allen Dateien und Verzeichnissen eines NTFS formatierten Volumen.
Im Master File Table speichert das NTFS-Dateisystem Informationen zu allen Dateien und Verzeichnissen eines NTFS formatierten Volumen.
Eine Datei wird immer in Zuordnungseinheiten eingeteilt und gespeichert. Ist die Datei sehr klein, wird sie direkt im MFT gespeichert. Je kleiner die ZE, desto weniger Speicherplatz wird "verschwendet".