
Prozessverwaltung
Ein Prozess ist ein Programm in Ausführung.
Prozesse erzeugen
Bei der Erzeugung eines Prozesses bekommt dieser eine eindeutige ID.
Windoof
- Die createProcess-Methode wird aufgerufen
- In 6 Phasen wird der Prozess initialisiert
Linux
- Die fork-Methode erzeugt eine exakte Kopie des aktuellen Prozesses
- Der Kindprozess wird mit eigenen Inhalten gefüllt, bekommt eine eigene P-ID → aushöhlen und neu befüllen
Prozesskontrollblock
In einem Prozesskontrollblock fasst das Betriebssystem alle zu einem einzelnen Prozess gehörenden Informationen zusammen.
ID, Besitzer, Programm-Ausführdatei, Zustand, Liste der geöffneten Dateien
Prozesstabelle
In einer Prozesstabelle fasst das Betriebssystem alle Informationen aller erzeugten Prozesse zusammen. Es stehen alle Prozesskontrollblöcke untereinander. (z.B. Task-Manager)
Prozesszustände
Wir unterscheiden drei Prozesszustände.
 Der Scheduler entscheidet, welcher Prozess die CPU als nächstes bekommt.
Der Scheduler entscheidet, welcher Prozess die CPU als nächstes bekommt.
Thread
Unter einem Thread versteht man einen Teil eines Prozesses, der einen unabhängigen Kontrollfluss repräsentiert.
Threads wechseln sich durch Threadkontextwechsel immer wieder auf der CPU ab.
Dabei gibt es auch einen Threadscheduler.
Jeder Prozess hat mindestens einen Thread.
Scheduling
Unter Scheduling versteht man die Tätigkeit des Aufteilens der verfügbaren Prozessorzeit (CPU-Zeit) auf alle Prozesse.
 Der Schedular führt die Scheduling-Tätigkeit durch.
Der Schedular führt die Scheduling-Tätigkeit durch.
Der Dispatcher entzieht bei einem Kontextwechsel dem derzeit aktiven Prozess die CPU und teilt sie dem nächsten Prozess zu.
Die Zeit, die ein Prozess zusammenhängend auf der CPU hat, wird als Quantum bezeichnet. Als Programmierer hat man keine Ahnung, wie lang ein solches Quantum auf einer jeweiligen CPU dauert und wie viele Befehle man innerhalb von einem Quantum abarbeiten kann.
Scheduling-Verfahren
First Come-First Serve

→ Die Prozesse laufen nacheinander vollständig auf der CPU ab.
Shortest Job First

→ Der kürzeste Prozess wird als erstes abgearbeitet. Die Zeit des Prozesses muss dafür vom Programmierer angegeben werden.
Shortest Remaining Time Next
→ Es bekommt der Prozess die CPU, der die kürzeste Restlaufzeit besitzt (Kontextwechsel, falls Prozess warten muss).
Round-Robin
→ Nach Ablauf eines Quantums wird ein Kontextwechsel zu einem Prozess mit der nächst-höheren P-ID und dem Zustand "Ready" gemacht.
→ Basiert auf einer ringförmig verketteten Liste (Next des letzten Elements zeigt wieder auf das erste).
Priority Scheduling
→ gleiches Verhalten wie beim Round Robin, nur werden zusätzlich Prioritäten eingeführt.
→ Es werden zuerst Prozesse mit hoher Priorität abgearbeitet.
→ Prioritäten werden nach bestimmter Zeit runtergestuft.
Synchronisation
Bei der Synchronisation geht es um Mechanismen zur Vermeidung von Problemen, die bei der nebenläufigen Ausführung von Prozessen oder Threads in Verbindung mit gemeinsam genutzten Betriebsmitteln entstehen können.
Ein Betriebsmittel ist eine beliebige Hard- oder Software-Ressource, z.B. eine Variable, ein Drucker oder eine Datei.
Unter Nebenläufigkeit versteht man die quasi-parallele Ausführung von Befehlen unterschiedlicher Prozesse oder Threads auf der CPU.
Unter Race Conditions versteht man Situationen, bei denen zwei oder mehr Prozesse ein oder mehrere Betriebsmittel gemeinsam nutzen, und das Ergebnis der Ausführung von der zeitlichen Reihenfolge der Zugriffe der beteiligten Prozesse oder Threads auf das Betriebsmittel abhängt.
→ z.B. nutzen einer gleichen Variable (Kap. 3.2.11.1.2)
Unter einem kritischen Abschnitt versteht man Programmteile, die während ihrer Ausführung auf der CPU nicht durch kritische Abschnitte anderer Prozesse oder Threads unterbrochen werden dürfen, sofern die beteiligten Prozesse oder Threads auf gemeinsam genutzte Betriebsmittel zugreifen.
Aktives Warten
Aktives Warten ist das ständige Abfragen eines Sperrkennzeichens am Eingang eines kritischen Abschnitts.
while (lock == 1); // Tue nichts
lock = 1;
// kritischer Abschnitt!
lock = 0;Problem:
Ein Kontextwechsel im ungünstigsten Moment (nach while (lock == 1); und vor Setzen der lock-Variable lock = 1;) führt dazu, dass es trotzdem zu Fehlern kommen kann. Der kritische Abschnitt ist entsperrt, die Variable aber noch nicht.
TSL
Mit dem TSL-Befehl passieren zwei Dinge als atomare Aktion:
Atomare Aktion: Nicht teilbar! KW kann entweder vor oder nach TSL Befehl passieren. Nicht zwischen dem Holen des Werts einer Speicherzelle und dem Überschreiben der Zelle mit dem Wert 1.
→ Wert aus Speicherzelle X in Akkumulator kopieren
→ Wert an Speicherzelle X mit 1 überschreiben (lock = 1)
Das Problem des ungünstigsten Moments ist gelöst.
Beim aktiven Warten wird CPU-Zeit vergeudet: Der Prozess ist 100% damit beschäftigt, die Bedingung zu prüfen und nichts zu tun.
Semaphore
Unter einem Semaphor versteht man eine Datenstruktur, welche einen ganzzahligen Zähler sowie eine Warteschlange bereitstellt. Zusätzlich sind zwei atomare Operationen P() und V() auf diese Datenstruktur definiert.
Semaphor (0, 1)
Mutex, binär
ein Betriebsmittel
Semaphor (x > 1)
Zählsemaphor
x Betriebsmittel
P()
- Hat der Zähler einen positiven Wert, verringere ihn um 1
- Ansonsten blockiere den aufrufenden Prozess und füge ihn der Warteschlange hinzu
V()
- Ist die Warteschlange nicht leer, entblockiere den ersten Prozess
- Ansonsten erhöhe den Zähler um 1
Wechselseitiger Ausschluss
Semaphor x = new Semaphore(1);
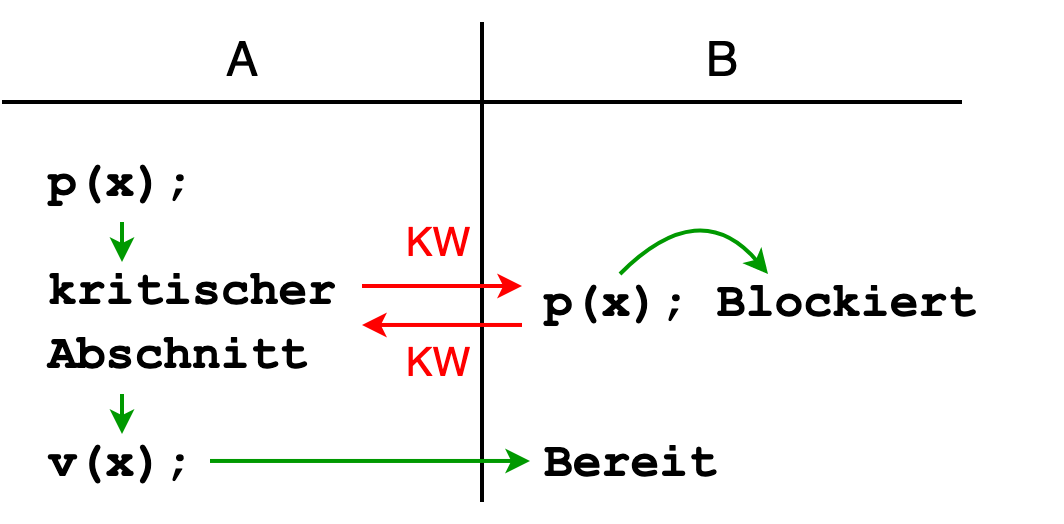
Da A sich im kritischen Abschnitt befindet, wird B durch x blockiert (Zähler von x ist auf 0). Nachdem A den kritischen Abschnitt verlässt, wird B durch v(x) entblockiert.
Reihenfolge durch Setzung
Semaphor frei = new Semaphor(1);Semaphor belegt = new Semaphor(0);
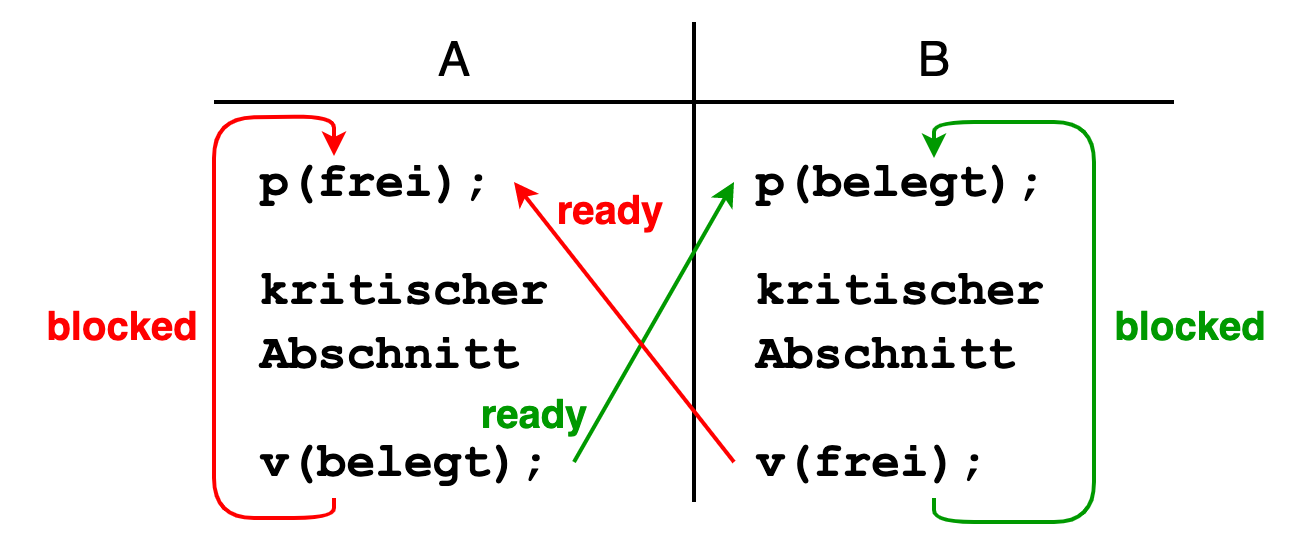
Bei zwei voneinander abhängigen Prozessen werden zwei Semaphore benötigt, sodass sich die Prozesse gegenseitig entblockieren.
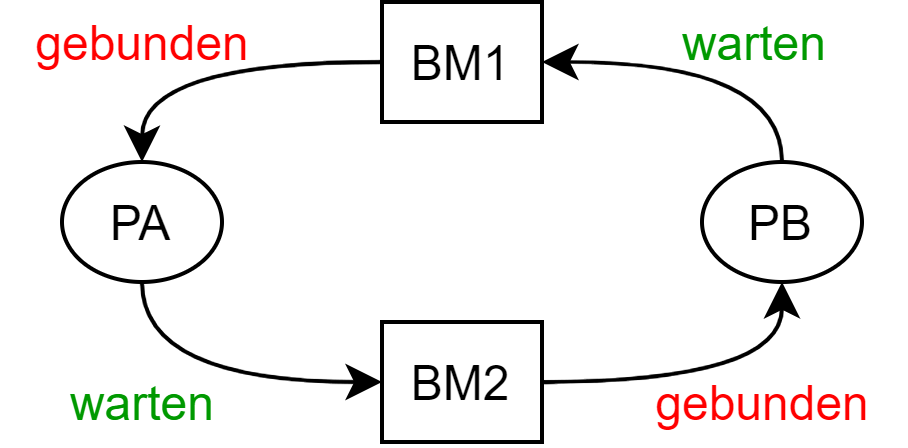
Deadlocks
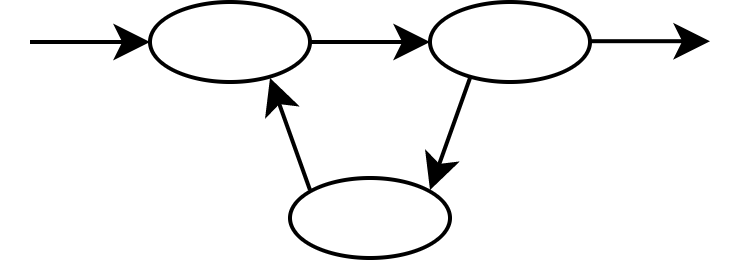
Eine Menge von Prozessen befindet sich in einem Deadlock-Zustand, wenn jeder Prozess aus der Menge auf ein Ereignis wartet, das nur ein anderer Prozess der Menge auflösen kann.
Beispiel: Prozess A und B benötigen BM1 und BM2. A hat bereits BM1 an sich gebunden, B hat BM2. Beide Prozesse warten nun auf das jeweils andere Betriebsmittel.
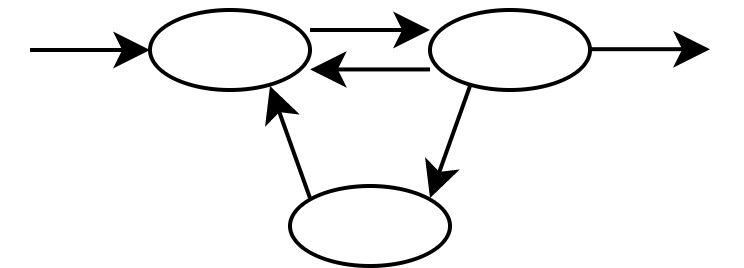
Betriebsmittelgraph
Vier Bedingungen nach Coffman
- Mutual exclusion condition
→ Gegenseitiger Ausschluss
→ es steht nur ein BM zur Verfügung - Wait for condition
→ warten auf ein anderes BM - No preemption condition
→ Den Prozessen können bereits gebundene BM nicht entrissen werden - Circular wait condition
→ siehe Betriebsmittelgraph
Theoretisch könnten Deadlocks vermieden werden, indem jedes BM eine Nummer bekommt und immer das BM mit der niedrigeren Nummer zuerst angefordert wird. (Bsp. Bank: 3.2.12.4 Aufg. 3)
In der Praxis funktioniert das nicht: Zu Beginn ist nicht klar, welche BM vom Prozess benötigt werden.
Deadlocks kommen sehr selten vor und es ist aufwendig, sie zu erkennen (kostet viel Rechenzeit).
Daher werden sie in gängigen Betriebssystemen ignoriert.
Interprozesskommunikation
In Betriebssystemen müssen Möglichkeiten geschaffen werden, damit Prozesse und Threads miteinander kommunizieren können:
- gemeinsame Daten- und Speicherbereiche
- Sockets → Netzwerkverbindung; Pipes → Ausgabe von P1 = Eingabe von P2
No Comments